 |
(1) |
J.Ph. Chancelier1
Le but de cette première séance est double, se refamiliariser avec la programmation en Scilab, commencer à voir la mise en oeuvre d'algorithmes d'optimisation.
On cherche ici à programmer un algorithme de gradient à pas constant pour un problème quadratique :
Écrire une première fonction qui tire de façon aléatoire
un matrice N x N définie positive dont on peut contrôler la plus
petite valeur propre (assurer qu'elle est plus grande qu'une valeur
donnée) (rand, diag, inv)
function A=defpos(n,lmin,lmax)
// tirage aléatoire d'une matrice définie positive
// dont le spectre aléatoire est réel uniforme sur [lmin,lmax]
A=diag( (lmax-lmin)*rand(N,1)+lmin);
P=rand(N,N);
A=P*A*inv(P);
endfunction
function A=defpos_sym(n,lmin,lmax)
// tirage aléatoire d'une matrice définie positive et symetrique
// dont le spectre aléatoire est réel uniforme sur [lmin,lmax]
A=diag((lmax-lmin)*rand(N,1)+lmin);
[U,H]=hess(rand(N,N));
A=U*A*U';
endfunction
A=defpos_sym(N,2,3);
b=rand(N,1);
Une remarque: génériquement une matrice aléatoire (ici avec loi uniforme) est inversible :
ne=100; for i=1:ne A1=rand(N,N); if rank(A1)<>N then pause; end; end
Écrire une fonction Scilab qui calcule le critère (1) et une fonction qui calcule le gradient du critère.
function y=f(x,A,b) y = (1/2)* x'*A*x + b'*x endfunction function y=df(x,A,b) y = (A+A')*x/2 + b; endfunction
Programmer un algorithme de gradient à pas constant sur le problème
quadratique. Il faudra évaluer numériquement la borne maximale
du pas de gradient et choisir un critère d'arrêt. On pourra aussi
tracer au cours des itérations l'évolution de la fonction coût
et évaluer les temps de calculs (timer)
function rho_max=rmax(A) alpha = min(abs(spec((A+A')/2))) // valeur de Lipschitz du gradient C= norm((A+A')/2,2) // contrainte sur le pas de gradient rho_max= 2*alpha/C^2 endfunction
function [c,xn,fxn]=gradient(x0,f,df,rho,stop,nmax,A,b) // a la fin de l'algoithme c contiendra les valeurs f(xi,...) // xn et fxn sont les valeurs finales obtenues // rho : pas de gradient // stop : valeur numérique du critère d'arret // nmax : nombre d'itérations maximales endfunction
Rendre le programme plus générique
function [c,xn,fxn]=gradient(x0,f,df,rho,stop,nmax,varargin) // a la fin de l'algoithme c contiendra les valeurs f(xi,...) // xn et fxn sont les valeurs finales obtenues // rho : pas de gradient // stop : valeur numérique du critère d'arret // nmax : nombre d'itérations maximales .... f(x,varargin(:)).... endfunction
Calculer la solution du problème d'optimisation revient ici à résoudre un système linéaire. On pourra comparer la solution du problème d'optimisation avec la solution obtenue en utilisant des algorithmes de résolution de systèmes linéaires de Scilab.
On rajoute maintenant au problème d'optimisation une contrainte linéaire de la forme
![]() . Pour que l'ensemble admissible ne soit pas réduit à
. Pour que l'ensemble admissible ne soit pas réduit à ![]() ,
il faut bien s'assurer que la matrice
,
il faut bien s'assurer que la matrice ![]() à un noyau de dimension non
nulle.
à un noyau de dimension non
nulle.
Écrire une fonction qui tire de façon aléatoire
un matrice N x N dont le rang est par exemple N/2
(indication : si M est une matrice n x m aléatoire quel est le rang
générique de M*M' ? ).
Reprendre la première partie avec un nouveau critère d'optimisation
ou on pénalise la contrainte ![]() en rajoutant au critère un terme
en rajoutant au critère un terme
![]() :
:
En utilisant la fonction colcomp (compression de colonnes)
On peut obtenir une base du noyau de l'opérateur ![]() . Cela permet
d'écrire les vecteurs
. Cela permet
d'écrire les vecteurs ![]() admissibles du problème avec contraintes
admissibles du problème avec contraintes
![]() sous la forme
sous la forme ![]() . On se ramène ainsi à un problème
d'optimisation sans contraintes en
. On se ramène ainsi à un problème
d'optimisation sans contraintes en ![]() . Le programmer
et comparer avec la section précédente.
. Le programmer
et comparer avec la section précédente.
Que se passe-t-il si le rang de la matrice ![]() n'est pas égale au
nombre de lignes de
n'est pas égale au
nombre de lignes de ![]() ? (c'est d'ailleurs ce qui se passe avec la
méthode que nous avons utilisé pour obtenir
? (c'est d'ailleurs ce qui se passe avec la
méthode que nous avons utilisé pour obtenir T).
Se ramener à une structure de contrainte ou T est de rang plein
(rowcomp).
Résoudre avec Scilab le système linéaire :
 |
(3) |
On se propose maintenant de trouver la position d'équilibre d'un fil
pesant fixé à ses deux extrémités en résolvant un problème de
minimisation. le fil pesant est caractérisé par son élévation ![]() .
Il est fixé a la position
.
Il est fixé a la position ![]() à l'élévation
à l'élévation ![]() et à la
position
et à la
position ![]() à l'élévation
à l'élévation ![]() . La longueur du fil est fixée
. La longueur du fil est fixée
![]() . En minimisant l'énergie potentielle du fil on est conduit au
problème de minimisation suivant :
. En minimisant l'énergie potentielle du fil on est conduit au
problème de minimisation suivant :
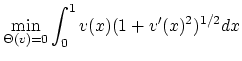 |
(4) |
où les contraintes
![]() sont :
sont :
| 0 | |||
| 0 | |||
 |
0 |
Pour résoudre ce problème numériquement nous allons tout d'abord éliminer la contrainte portant sur la longueur de la corde par pénalisation. On va remplacer le problème initial par :
 |
(5) |
Pour se ramener à un problème d'optimisation dans un espace de
dimension finie, on va chercher ![]() sous la forme d'une fonction
affine par morceaux.
Soient
sous la forme d'une fonction
affine par morceaux.
Soient
![]() des points régulièrement espacés sur
des points régulièrement espacés sur ![]() ,
,
![]() (
(![]() ). On cherche
). On cherche ![]() affine par morceaux sur les
intervalles
affine par morceaux sur les
intervalles
![]() . Soit
. Soit
![]() le vecteur des
valeurs de
le vecteur des
valeurs de ![]() au points
au points ![]() ,
, ![]() s'écrit :
s'écrit :
| (6) |
Le problème d'optimisation sur
![]() s'écrit :
s'écrit :
| (7) |
 |
|||
 |
Pour résoudre numériquement ce problème on va utiliser une
méthode de gradient. On notera que les deux contraintes
qui restent ![]() et
et ![]() ne seront pas traités comme
des contraintes d'un problème d'optimisation. Ces deux valeurs de
ne seront pas traités comme
des contraintes d'un problème d'optimisation. Ces deux valeurs de ![]() étant connues le problème d'optimisation se pose sur
étant connues le problème d'optimisation se pose sur
![]() .
.
L'algorithme est donc :
Comme on le voit sur l'équation (8) l'algorithme de
gradient est un algorithme vectoriel, le vecteur ![]() est mis à jour
à chaque itération.
On devra tenir compte de ce fait et programmer l'algorithme de
gradient de façon vectorielle en Scilab. La seule boucle
est mis à jour
à chaque itération.
On devra tenir compte de ce fait et programmer l'algorithme de
gradient de façon vectorielle en Scilab. La seule boucle for du
programme sera la boucle d'itération (8).
On pourra au cours de l'algorithme d'optimisation tracer la position de la corde et voir ce tracé évoluer au cours de l'algorithme.
On pourra programmer les fonctions suivantes :
function [j]=J(v,L,h,eps) ... endfunction
function [y]=R(v1,v2,h) ... endfunction
function [y]=Dr(v1,v2,h) ... endfunction
function [l]=lc(v,h) ... endfunction
function [dj]= dJ(v,L,h,eps) ... endfunction
|
