Contents
1 The modelling
Let us consider some regulating agency aiming at the sustainable use and harvesting of a
renewable resource. The biomass of this resource at time t is denoted by B(t) while the
harvesting level is h(t). We assume that the natural dynamics is described by some growth
function Biol. Under exploitation, the following controlled dynamics is obtained for
t ∈ ℕ
 | (1) |
with the admissibility constraint
 | (2) |
The policy goal is to guarantee at each time a minimal harvesting
 | (3) |
together with a non extinction level for the resource
 | (4) |
The combination of constraints (2) and (3) yields the state constraint
 | (5) |
For the sake of simplicity, we assume that hlim > Blim.
2 The viability result
We use the viability approach to handle the problem. We aim at “showing” and recovering
numerically the characterization of the viability kernel described in Result 1. We introduce the
following notations.
- The sustainable yield function Sust is defined by
 | (6) |
- The maximum sustainable biomass BMSE and maximum sustainable yield hMSE are
defined by
 | (7) |
- When hlim ≤ hMSE, the viability barrier BV is the solution of
 | (8) |
Result 1 Assume that Biol is an increasing continuous function on ℝ+. The viability kernel is
characterized by
 | (9) |
Viable controls are those h (depending on B) such that
 | (10) |
3 The Beverton-Holt case
3.1 Dynamics and equilibrium
We consider the natural evolution governed by
 | (11) |
For numerical computations and simulations, we consider the case of the Pacific yellowfin tuna,
with intrinsic growth R = 2.25 metric tons per year and carrying capacity K = 250 000 metric
tons. Since the carrying capacity solves Biol(K) = K, we obtain
 | (12) |
Question 1
- Define a Scilab function for the dynamics Biol in (11), and a Scilab function for the
equilibrium harvesting h = Sust(B) defined in (6).
- Plot the sustainable yield function B
 Sust(B).
Sust(B).
- Compute the maximum sustainable population equilibrium BMSE and the maximum
sustainable yield hMSE.
R_tuna=2.25; R=R_tuna;
K_tuna=250000; K=K_tuna;
b=(R-1)/K; function y=dynamics(B) y=R*B ./(1+b*B);endfunction
function h=SY(B) h=B-(B ./(R-b*B));endfunction B_MSE=(R-sqrt(R))/b;
disp('The maximum sustainable population equilibrium is '+string(B_MSE)+ ... ' metric tons (MT)');
h_MSE=SY(B_MSE); disp('The maximum sustainable yield is '+string(h_MSE)+' metric tons (MT)');
xset("window",10);xbasc();
abcisse_B=linspace(0,K,20); plot2d(abcisse_B,SY(abcisse_B))
xtitle('Sustainable yield associated to Beverton-Holt dynamics','biomass (MT)', ...
'yield (MT)');
3.2 The unsustainable case: 𝕍iab = ∅
Question 2
- Choose a guaranteed harvesting hlim strictly larger than Sust(BMSE).
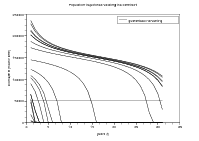
- For several initial conditions B0, compute different trajectories for the smallest
admissible harvesting, namely h(t) = hlim.
- What happens with respect to viability constraint (5)?
- Show that the situation is more catastrophic with sequences of harvesting h(t) larger than the
guaranteed one hlim. Try for instance admissible policies:
- h(t,B) = B;
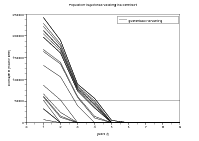
- h(t,B) = αhlim + (1 − α)B with α ∈ [0, 1] (see Figure 1(a));
- h(t,B) = α(t)hlim+(1−α(t))B, where (α(t))t∈ℕ is an i.i.d. sequence of uniform
random variables in [0, 1] (see Figure 1(b)).
nbsimul=20;
h_lim=(1+rand()/5)*h_MSE Horizon=30; years=1:Horizon; yearss=[years,years($)+1];
traj_B=[]; xset("window",11);xbasc(); for i=1:nbsimul do traj_B(1)=K*rand(1);
for t=years do traj_B(t+1)=max(0,dynamics(traj_B(t)-h_lim));
end, plot2d(yearss,traj_B); end, plot2d(yearss,h_lim*ones(yearss))
xtitle('Population trajectories violating the constraint','years (t)', ...
'biomass B (metric tons)') legends('guaranteed harvesting',1,'ur')
function h=policy(t,B,alpha)
h=max(h_lim,alpha*h_lim+(1-alpha)*B); endfunction Horizon=8; years=1:Horizon;
yearss=[years,years($)+1]; traj_B=[]; traj_h=[]; alpha=rand(years);
xset("window",12);xbasc(); for i=1:nbsimul do traj_B(1)=K*rand(1); for t=years do
traj_h(t)=policy(t,traj_B(t),alpha(t)); traj_B(t+1)=max(0,dynamics(traj_B(t)-traj_h(t)));
end, plot2d(yearss,traj_B); end, plot2d(yearss,h_lim*ones(yearss))
xtitle('Population trajectories violating the constraint','years (t)', ...
'biomass B (metric tons)') legends('guaranteed harvesting',1,'ur')
3.3 The sustainable case: 𝕍iab≠∅
Question 3
- Now choose a guaranteed harvesting hlim strictly smaller than hMSE =
Sust(BMSE).
- Compute the viability barrier BV .
- Prove that the viable policies are those h(t,B) which lie within the set [hlim,h♯(B)]
where
 | (13) |
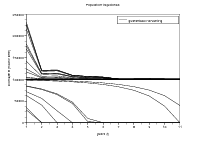
- For different initial conditions B0, compute different trajectories for a harvesting policy of the
form
 | (14) |
- What happens with respect to viability constraint (5)? See Figure 2.
h_lim=(1-rand()/5)*h_MSE
function residual=viabbarrier(B) residual=SY(B)-h_lim endfunction B_V=fsolve(0,viabbarrier)
function h=h_max(B) h=B-(B_V/(R-b*B_V))
endfunction function h=viab(t,B,alpha) h=max(h_lim,alpha*h_lim+(1-alpha)*h_max(B));
endfunction Horizon=10; years=1:Horizon; yearss=[years,years($)+1]; xset("window",21);xbasc();
xtitle('Population trajectories ','years (t)','biomass B (metric tons)') traj_B=[];
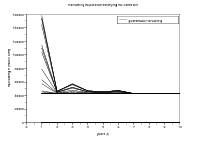
xset("window",22);xbasc(); xtitle("Harvesting trajectories satisfying the constraint",'years (t)', ...
'harvesting h (metric tons)') traj_h=[]; alpha=rand(years); for i=1:nbsimul do
traj_B(1)=K*rand(1); for t=years do traj_h(t)=viab(t,traj_B(t),alpha(t));
traj_B(t+1)=max(0,dynamics(traj_B(t)-traj_h(t))); end,
xset("window",21);plot2d(yearss,traj_B); plot2d(yearss,B_V*ones(yearss));
legends('viability barrier',1,'ur') xset("window",22);plot2d(years,traj_h);
plot2d(years,h_lim*ones(years)); legends('guaranteed harvesting',1,'ur')
plot2d(years,0*ones(years)); end
4 Another population dynamics
The natural evolution is now governed by
 | (15) |
Question 4 Do the same as in the previous Beverton-Holt case.