

| L'École des Ponts ParisTech est membre fondateur de |
L'École des Ponts ParisTech est certifiée |



|
|


L’approche écosystémique de la gestion des pêches est en plein développement et il est de plus en
plus nécessaire de disposer de modèles de poissons fiables et qui rendent bien compte de
l’évolution des populations marines.
On s’intéresse ici aux modèles multi-espèces de poissons exploités par la pêche. Actuellement, ces modèles sont principalement utilisés dans la mer du Nord et la mer Baltique.
Développé par Gulland (1965), ce modèle structuré en âge ne rend pas compte des interactions
entre différentes espèces.
On représente par Na,t le nombre d’individus d’âge a au début de la période [t,t + 1[
(généralement une année ou un trimestre) et Ca,t le nombre d’individus capturés (par
la pêche) sur la période [t,t + 1[. Les 2 équations fondamentales de la SSVPA sont :
 | (3) |
où
Pour évaluer le nombre N0,t+1 d’individus d’âge 0 au début de la période [t + 1,t + 2[, on utilise la relation de stock-recrutement de Ricker :
 | (4) |
avec
 | (5) |
où
On veut écrire ce modèle sous forme de modèle d’état. Le vecteur d’état qu’on prend représente le stock :
et le vecteur commande l’effort de pêche :
.
A partir de (2) et (4) on trouve que :
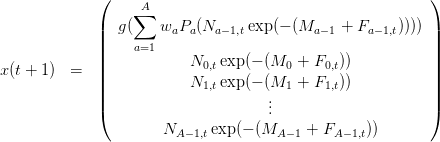 | (6) |
avec

Il s’agit bien d’une équation dynamique de la forme

Dans cette partie, on va simuler l’évolution d’une population de hareng de la mer du Nord sur un
horizon fini.
Le hareng est à dix classes d’âge. Le vecteur d’état qu’on prend est :
D’après ce qui précède, on a l’équation dynamique suivante :
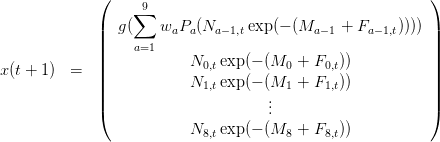
avec g(z) = αze−βz.
Ouvrir un fichier ssvpa.sce et y recopier les données numériques suivantes:
On écrit la fonction de la dynamique. Pour cela, on écrit d’abord la fonction qui donne la biomasse féconde.
Dans notre modèle, la biomasse B d’une espèce donnée s’écrit :
 | (7) |
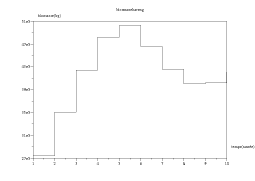
Question 1 Représenter l’évolution de la biomasse. On utilisera la commande plot2d2.
Question 2 Répéter la même opération pour différentes valeurs de l’horizon (T=20 et T=50) et de l’effort de pêche. Commenter.
Cette fois, on intègre les interactions entre différentes espèces dans la modélisation en distinguant dans la mortalité naturelle un terme dû à la prédation. On garde les mêmes notations en ajoutant l’indice i(i =, 1..,n) pour distinguer entre les différentes espèces:
 | (8) |
où gi est la fonction de recrutement pour l’espèce i, par exemple (mais pas forcément) la relation de stock-recrutement de Ricker

et avec

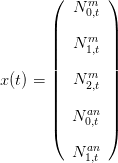
En prenant un vecteur d’état de la forme
On prend alors pour vecteur d’état le vecteur de vecteurs
Pour l’espèce i, on a d’après (8)
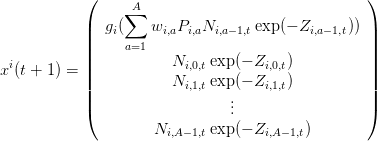 | (9) |
Par rapport au modèle précèdent, le nouveau terme M2,i,a,t couple les différentes équations d’état étant donné qu’il s’exprime en fonction de la biomasse de toutes les autres espéces. En effet, pour un prédateur, on a M2 = 0 et pour une proie p d’âge b on a :

avec

On pose ui(t) =  et on définit le vecteur commande par u(t) =
et on définit le vecteur commande par u(t) = 
Pour simplifier, on suppose que R(i,a,t) est indépendante du temps.
On développe l’expression de M2; on trouve que pour une espèce i, la mortalité est de la forme :

En posant

 | (10) |
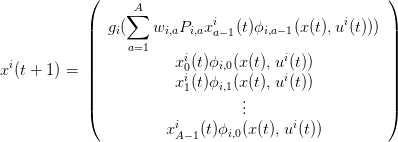
Soit hi,a la fonction
 | (11) |
On peut écrire que
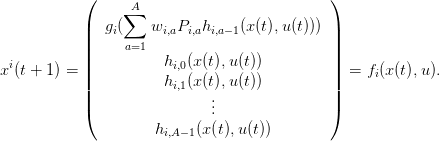
Finalement on obtient une équation dynamique de la forme voulue

En s’inspirant de la population marine du Golfe de Gascogne, on considère l’écosystème suivant composé d’un prédateur et d’une proie :
Le vecteur d’état est :
On suppose que la mortalité par pêche dépend de deux variables de contrôle u(t) et v(t) :
D’après ce qui précède qu’on aboutit à l’équation dynamique
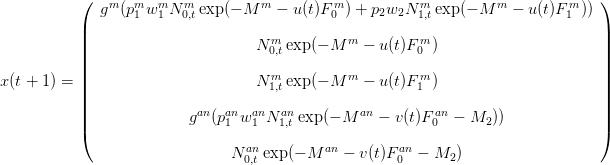
avec

Elle est de la forme x(t + 1) = f(x(t),u(t),v(t)).
On suppose u(t) et v(t) constants. Pour le merlu (prédateur), on utilise la relation de stock-recrutement de Ricker
 | (12) |
mais, pour l’anchois, on n’utilise pas la relation de stock-recrutement de Ricker. En effet, l’anchois est une espèce qui est très sensibles aux fluctuations environnementales (climat) à court terme ; on considère que le recrutement varie aléatoirement autour d’une valeur moyenne :
 | (13) |
Charger dans un fichier merlu_anchois.sce les données numériques suivantes
Recopier dans le même fichier les fonctions de mortalité par pêche M2 et de biomasse féconde pour le merlu.
On écrit à la suite la fonction qui donne la dynamique f du modèle merlu_anchois.
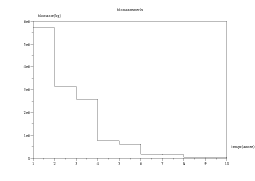
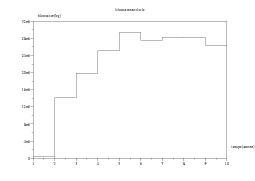
Question 3 Représenter l’évolution de la biomasse de chacune des deux espèces avec la commande plot2d2.
Question 4 Répéter la même opération pour différentes valeurs de u et de l’horizon (T=20 et T=30). Commenter.
[1] Kjartan G.Magnusson, An overview of the multispecies VPA - theory and applications, Reviews in Fish Biology and Fisheries, 5 195-212 (1995).
[2] H.Gislason Single and Multispecies reference points for Baltic fish stocks, ICES Journal of Marine Science, 56: 571-583. 1999
[3] H.Gislason, Th.Helgason, Species interaction in assesment of fish stocks with special application to the North Sea, Dana, vol.5, pp.1-44, 1985.
[4] J. G.Pope, The ICES Multispecies Assesment Working Group: evolution, insights and future problems, ICES mar.Sci.Symp.,193:22-33. 1991.
[5] Report of the Workshop on MSVPA in the North SEA, Charlottenlund, Denmark 8-12 avril 2002.
[6] Sparre.P, Introduction to multispecies virtual population analysis, ICES mar.Sci.Symp.,193:12-21.1991.
[7] Mark Kot, Elements of Mathematical Ecology, Cambridge University Press.
| L'École des Ponts ParisTech est membre fondateur de |
L'École des Ponts ParisTech est certifiée |
|
|
|



