




| L'École des Ponts ParisTech est membre fondateur de |
L'École des Ponts ParisTech est certifiée |



|
|


We formalize the problem of fixing energy reserves in a day-ahead market as a two stage stochastic optimization problem. A decision has to be made at night of day J — which quantity of the cheapest energy production units (reserve) to be mobilized — to meet a demand that will materialize at morning of day J + 1. Excess reserves are penalized; demand unsatisfied by reserves have to be covered by costly extra units. Hence, there is a trade-off to be assessed by optimization.
There are two stages, represented by the letter t (for time):
We suppose that the demand, materialized on the morning of day J + 1, can take a finite number S of possible values Ds, where s denotes a scenario in the finite set 𝕊 (S=card(𝕊)).
We denote πs the probability of scenario s, with
 | (1) |
Notice that we do not consider scenarios with zero probability.
The decision variables are the scalar Q0 and the finite sequence  s∈𝕊 of scalars, as follows:
s∈𝕊 of scalars, as follows:
The decision variables can be considered as indexed by a tree with one root (corresponding to the index 0) and as many leafs as scenarios in 𝕊 (each leaf corresponding to the index 1,s): Q0 is attached to the root of the tree, and each Q1,s is attached to a leaf corresponding to s.
The balance equation between supply and demand is
 | (2) |
The energies mobilized at stages t = 0 and t = 1 display different features:
We consider the stochastic optimization problem
Here, we look for energy reserve Q0 and recourse energy Q1,s so that the balance
equation (3d) is satisfied (at stage t = 1) at minimum expected cost in (3a). By weighing each
scenario s with its probability πs, the optimal solution  performs a compromise
between scenarios.
performs a compromise
between scenarios.
Here, we suppose that the costs are linear:
 | (4) |
Therefore, the stochastic optimization problem (3) now becomes
This optimization problem (5) is linear. When the number S of scenarios is not too large, we can use linear solvers.
Question 1 We consider the case when 𝕊 = {L,M,H} has S = 3 scenarios (low, medium, high). We want to transform the linear optimization problem (5) under a form adapted to a linear solver.
Question 2 We are going to numerically solve the linear optimization problem (5).
Question 3 We are going study the impact of the number S of scenarios on the numerical resolution of the linear optimization problem (5).
Here, we suppose that the costs are quadratic and convex:
 | (7) |
The optimization problem (3) is quadratic convex:
When the number S of scenarios is not too large, we can use quadratic solvers.
Question 4 We are going to numerically solve the quadratic convex optimization problem (8).
 is an inner solution to
the optimization problem (8a), that is, check numerically that the inequalities (8b) and
(8c) are strict. What is the difference with the optimal solution of Question 2? Discuss the
difference (make the connection with the properties of the solutions of a linear program).
is an inner solution to
the optimization problem (8a), that is, check numerically that the inequalities (8b) and
(8c) are strict. What is the difference with the optimal solution of Question 2? Discuss the
difference (make the connection with the properties of the solutions of a linear program).
 satisfies the following
relation between marginal costs:
satisfies the following
relation between marginal costs:
 | (9) |
Question 5 We are going to numerically solve the quadratic convex optimization problem (8) after changing the relative values of the (quadratic) parameters K0 and K1. For the parameters K0, l0, l1, we take the same values as those in Question 2 (hence l1 > l0) and in Question 4.
Question 6 We are going study the impact of the number S of scenarios on the numerical resolution of the quadratic convex optimization problem (8).
Question 7 This theoretical question may be ignored
(by those who want to focus on numerical results)
For this question, we temporarily ignore the inequalities (8b) and (8c) in (8). Therefore, we
consider the optimization problem (8a) with equality constraints (8d), that is:
![[ ]
S ∑ 1- 2 1- 2
J0 : (Q0, (Q1,s)s∈𝕊) ∈ ℝ × ℝ ↦→ πs 2K0Q 0 + l0Q0 + 2 K1Q 1,s + l1Q1,s .
s∈𝕊](stochastic_programming_energy14x.png) | (11) |
What are the dimensions of the Hessian matrix?
 of (10) satisfy the Karush-Kuhn-Tucker (KKT) conditions (first-order
optimality conditions)?
of (10) satisfy the Karush-Kuhn-Tucker (KKT) conditions (first-order
optimality conditions)?
 associated with problem (10).
associated with problem (10).
 | (12) |
 is an inner optimal solution to problem (8a) —
we have the following relation between marginal costs:
is an inner optimal solution to problem (8a) —
we have the following relation between marginal costs:
 | (13) |
Give an economic interpretation of this equality.
When the number S of scenarios is too large, Problem (5) — be it linear or convex — cannot be solved by direct methods.
To bypass this problem, we use a “trick” consisting in introducing new decision variables  s∈𝕊,
instead of the single decision variable Q0, and we write
s∈𝕊,
instead of the single decision variable Q0, and we write
 | (14) |
These equalities are called the non-anticipativity constraints. Indeed, the equations (14) express that
 | (15) |
that is, the decision at stage t = 0 does not depend on the scenario s, hence cannot anticipate the future. Later, we will treat the constraints (14) by duality.
Therefore, the stochastic optimization problem (3) now becomes
By the assumption (1) that there are no scenarios with zero probability (πs > 0), we replace each equality in the last equation by the equivalent one
 | (16e) |
We attach, to each equality above a multiplier λ0,s. We put
 | (17) |
The corresponding Lagrangian is
Question 8 This theoretical question may be ignored
(by those who want to focus on numerical results)
When the costs are quadratic and convex as in (7), show that
![[ ]
S S ∑ 1 2 1 2
J : Q ∈ ℝ × ℝ ↦→ πs 2K0Q 0,s + l0Q0,s + 2-K1Q 1,s + l1Q1,s
s∈𝕊](stochastic_programming_energy27x.png) | (19) |
in (16a) is a-strongly convex in  , and provide a possible a > 0,
, and provide a possible a > 0,
We consider the following optimization problem
under the assumptions that
Then the following algorithm — called dual gradient algorithm, or Uzawa algorithm — converges toward the optimal solution of Problem (20), when 0 < ρ < 2a∕κ2.
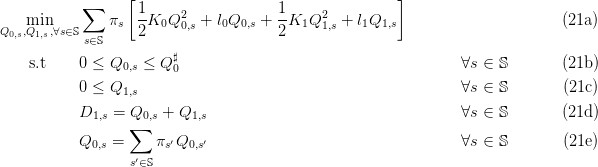
When the costs are quadratic and convex as in (7), the optimization problem (16) becomes:
Question 9 This theoretical question may be ignored
(by those who want to focus on numerical results)
When the costs are quadratic and convex as in (7), identify in the optimization problem (21) the
corresponding elements in the Uzawa algorithm .1:
Question 10 We are going to numerically solve the quadratic convex optimization problem (21) by Uzawa algorithm.
 given by the algorithm? Do you have that
given by the algorithm? Do you have that  , for all
, for all
 ?
?
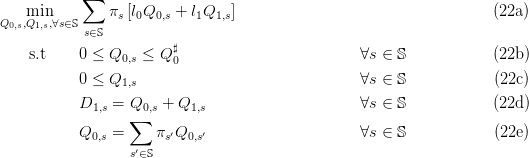
Here, we suppose that the costs are linear, as in (4).
The optimization problem (16) becomes:
Question 11 We are going to numerically solve the linear optimization problem (22).
To bypass the difficulty in applying Uzawa algorithm with linear costs, we use a “trick” consisting
in introducing new decision variables Q0 and  s∈𝕊, instead of the single decision variable Q0,
and we write
s∈𝕊, instead of the single decision variable Q0,
and we write
 | (23) |
These equalities are another form of the non-anticipativity constraints. Indeed, the equations (23) express that the decision at stage t = 0 cannot anticipate the future, hence cannot depend on the scenario s. We will treat these constraints by duality.
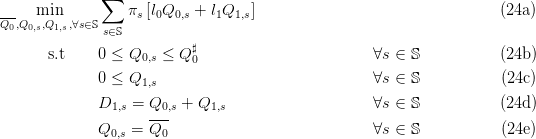
Therefore, the stochastic optimization problem (3) now becomes
By the assumption (1) that there are no scenarios with zero probability (πs > 0), we replace each equality in (24e) by the equivalent one
 | (25) |
We attach, to each equality above a multiplier λ0,s. We put
 | (26) |
Question 12 We are going to numerically solve the linear optimization problem (24) by the Progressive Hedging algorithm.
| L'École des Ponts ParisTech est membre fondateur de |
L'École des Ponts ParisTech est certifiée |
|
|
|



